

[ 학습자료 목차 ]
 실습 목표
실습 목표
Python IDE : Thoony를 활용하여 피코에 내부 LED를 깜빡이게 할 수 있다.
실습 리스트
Thoony 설치 및 기본 코드 구동
•
설명 동영상
•
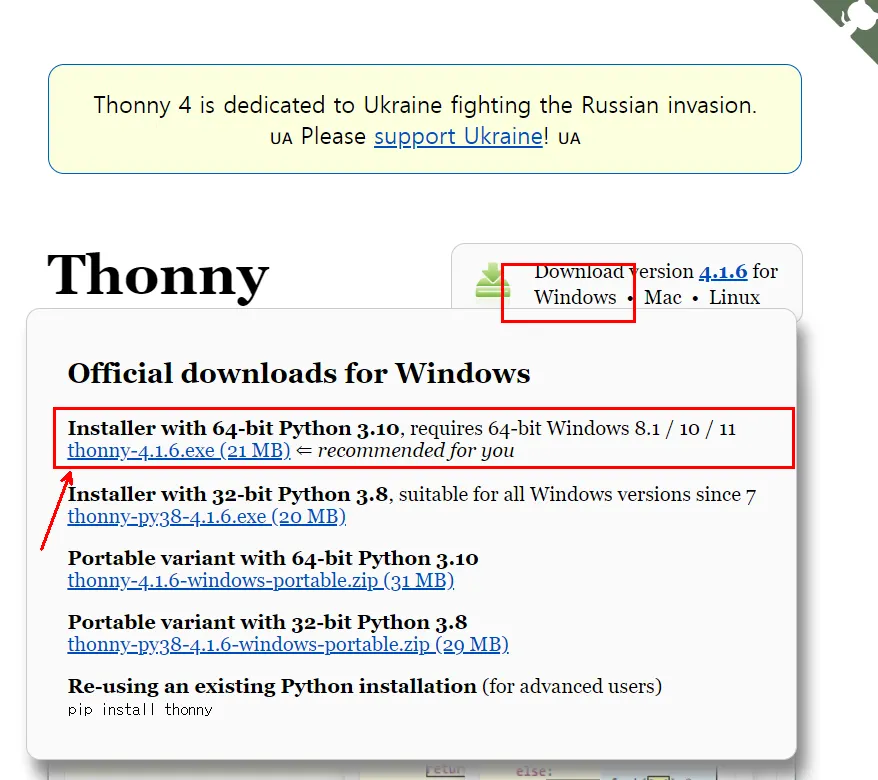
Thonny 설치 링크
•
피코 마이크로 파이썬 드라이버 다운로드 링크

피코 마이크로파이썬 설치 및 내부 LED 깜빡이기
•
내부 led 깜빡이기 코드
import machine
import utime
# GPIO 25 핀을 출력 모드로 설정
led = machine.Pin(25, machine.Pin.OUT)
# 무한 루프에서 0.5초마다 LED를 토글합니다.
while True:
led.toggle()
utime.sleep(0.5)
Python
복사
이론 자료
실습에 활용된 재료 List
•
라즈베리파이 피코 : 마이크로 컨트롤러로써 다양한 전자부품(LED, 서보모터, 센서 등)을 제어함.

•
usb 5핀 케이블 : 피코와 pc 연결 케이블

끝.

•
작성자 : 성원경(상암고 교사, Maker Wonking)
•
작성일 : 2025.7.11
•
문의 : 메일(wonking710@naver.com), 카톡(wonking710)