

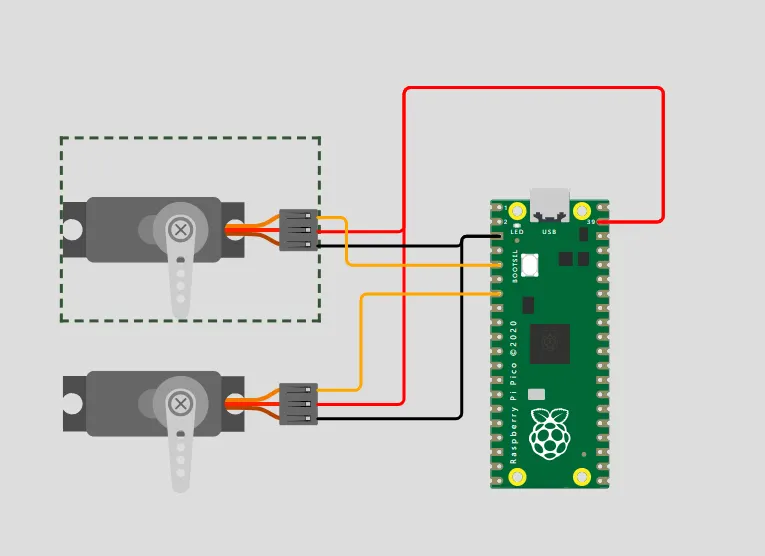
서보모터 테스트 회로 구성도
•
3번, 5번 gpio에 서보모터 연결
코드 다운로드
•
main.py 코드
from machine import Pin, PWM
import bluetooth
from ble_simple_peripheral import BLESimplePeripheral
import utime
# 블루투스 저에너지(BLE) 객체 생성
ble = bluetooth.BLE()
# BLE 간단한 주변장치 객체 생성
sp = BLESimplePeripheral(ble)
# 온보드 LED를 제어하기 위한 핀 설정
led = Pin("LED", Pin.OUT)
led.value(1) # 연결 확인을 위해 초기 LED 켜짐
# 서보모터를 제어하기 위한 PWM 객체 생성
servo_horiz = PWM(Pin(3)) # 수평 방향 서보모터 (GP3)
servo_vert = PWM(Pin(5)) # 수직 방향 서보모터 (GP5)
# 서보모터의 주파수를 50Hz로 설정
servo_horiz.freq(50)
servo_vert.freq(50)
# 최소 및 최대 듀티 사이클 값 정의
min_duty = 1638 # 0도에 해당하는 듀티 사이클
max_duty = 8192 # 180도에 해당하는 듀티 사이클
def angle_to_duty(angle):
# 주어진 각도(0~180도)를 듀티 사이클로 변환하는 함수
return int(min_duty + (max_duty - min_duty) * angle / 180)
# 초기 각도를 90도로 설정 (중앙 위치)
angle_horiz = 90
angle_vert = 90
# 서보모터를 초기 위치로 이동
servo_horiz.duty_u16(angle_to_duty(angle_horiz))
servo_vert.duty_u16(angle_to_duty(angle_vert))
# LED 상태 변수
led_state = 1
# BLE를 통해 수신된 데이터를 처리하는 콜백 함수 정의
def on_rx(data):
global angle_horiz, angle_vert, led_state
print("데이터 수신: ", data) # 수신된 데이터 출력
command = data.decode().strip() # 바이트 데이터를 문자열로 변환하고 공백 제거
if command == 'led':
# LED 상태 토글
led.value(not led_state)
led_state = 1 - led_state
print("LED 상태 변경")
elif command == 'w':
# 위로 이동: 수직 각도를 증가
angle_vert += 10
if angle_vert > 180:
angle_vert = 180
servo_vert.duty_u16(angle_to_duty(angle_vert))
print(f"위로 이동: 수직 각도 = {angle_vert}")
elif command == 's':
# 아래로 이동: 수직 각도를 감소
angle_vert -= 10
if angle_vert < 0:
angle_vert = 0
servo_vert.duty_u16(angle_to_duty(angle_vert))
print(f"아래로 이동: 수직 각도 = {angle_vert}")
elif command == 'a':
# 왼쪽으로 이동: 수평 각도를 감소
angle_horiz -= 10
if angle_horiz < 0:
angle_horiz = 0
servo_horiz.duty_u16(angle_to_duty(angle_horiz))
print(f"왼쪽으로 이동: 수평 각도 = {angle_horiz}")
elif command == 'd':
# 오른쪽으로 이동: 수평 각도를 증가
angle_horiz += 10
if angle_horiz > 180:
angle_horiz = 180
servo_horiz.duty_u16(angle_to_duty(angle_horiz))
print(f"오른쪽으로 이동: 수평 각도 = {angle_horiz}")
elif command == 'q':
# 각도를 초기화하여 중앙 위치로 이동
angle_horiz = 90
angle_vert = 90
servo_horiz.duty_u16(angle_to_duty(angle_horiz))
servo_vert.duty_u16(angle_to_duty(angle_vert))
print("각도를 초기화합니다: 수평 각도 = 90, 수직 각도 = 90")
else:
print("유효하지 않은 명령입니다. 'w', 'a', 's', 'd', 'q' 또는 'led'를 사용하세요.")
# BLE 연결 상태를 확인하고 데이터 수신 시 콜백 함수 등록
while True:
if sp.is_connected():
sp.on_write(on_rx) # 데이터 수신 시 콜백 함수 호출
utime.sleep(0.1) # CPU 사용량을 줄이기 위한 짧은 지연
Python
복사
•
코드 출처

활용 예시

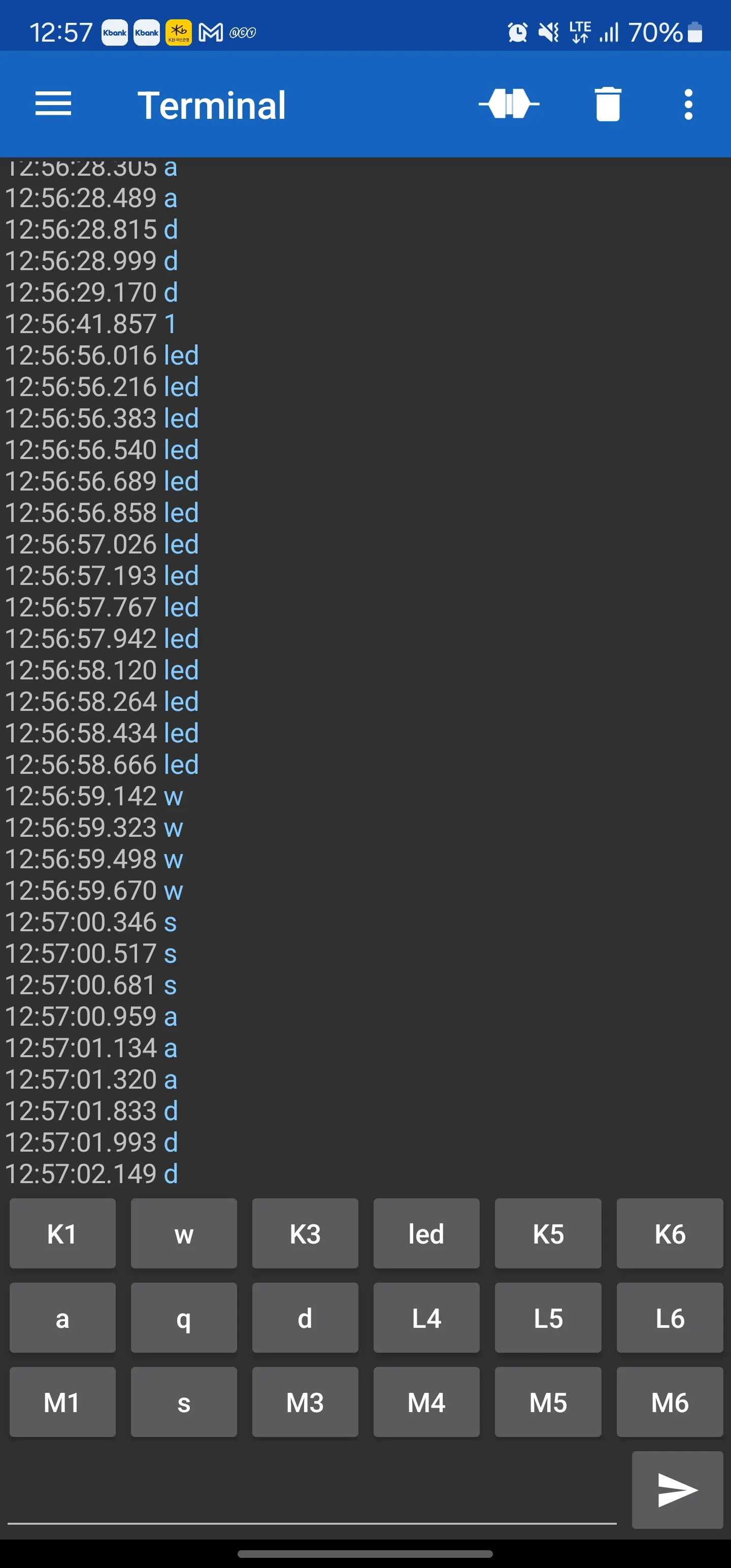
컨트롤러(안드로이드 앱)
4족 pico 로봇 블루투스 통신코드
from machine import Pin, PWM
from time import sleep
import bluetooth
from ble_simple_peripheral import BLESimplePeripheral
import utime
# 각도를 듀티 사이클로 변환하는 함수
def angle_to_duty(angle):
min_duty = 1638 # 최소 듀티 (0도에 해당)
max_duty = 8192 # 최대 듀티 (180도에 해당)
duty = int(min_duty + (angle / 180.0) * (max_duty - min_duty))
return duty
# 서보 모터 초기화
servos = {}
# 서보 모터에 연결된 GPIO 핀 설정
servo_pins = {
'Leg1F': 4,
'Leg1B': 3,
'Leg2F': 2,
'Leg2B': 1,
'Leg3F': 8,
'Leg3B': 7,
'Leg4F': 6,
'Leg4B': 5,
'Headservo': 9
}
for name, pin_num in servo_pins.items():
pwm = PWM(Pin(pin_num))
pwm.freq(50) # 서보 모터용 주파수 설정
servos[name] = pwm
# 초기 각도 설정
LALeg1F = 80
LALeg1B = 100
LALeg2F = 100
LALeg2B = 80
LALeg3F = 80
LALeg3B = 100
LALeg4F = 100
LALeg4B = 80
LAHeadservo = 90 # 초기 머리 각도
# 서보 초기 상태 저장
motor_running = False # 초기에는 정지 상태
# 초기 위치로 서보 모터 이동
def initialize_position():
servos['Leg1F'].duty_u16(angle_to_duty(LALeg1F))
servos['Leg1B'].duty_u16(angle_to_duty(LALeg1B))
servos['Leg2F'].duty_u16(angle_to_duty(LALeg2F))
servos['Leg2B'].duty_u16(angle_to_duty(LALeg2B))
servos['Leg3F'].duty_u16(angle_to_duty(LALeg3F))
servos['Leg3B'].duty_u16(angle_to_duty(LALeg3B))
servos['Leg4F'].duty_u16(angle_to_duty(LALeg4F))
servos['Leg4B'].duty_u16(angle_to_duty(LALeg4B))
servos['Headservo'].duty_u16(angle_to_duty(LAHeadservo)) # 머리 서보를 초기 각도로 설정
initialize_position()
sleep(2) # 초기화 상태 유지 시간
# 목표 각도 설정
TOLeg1F = LALeg1F
TOLeg1B = LALeg1B
TOLeg2F = LALeg2F
TOLeg2B = LALeg2B
TOLeg3F = LALeg3F
TOLeg3B = LALeg3B
TOLeg4F = LALeg4F
TOLeg4B = LALeg4B
TOHeadservo = LAHeadservo
# 부드러운 움직임 설정
smoothrun = True
smoothdelay = 0.005 # 딜레이를 줄여서 속도 증가 (5ms)
# Headservo 움직임을 위한 변수 설정
HeadservoAngle = LAHeadservo # 초기 각도
HeadservoMin = 45 # 최소 각도
HeadservoMax = 135 # 최대 각도
HeadservoStep = 5 # 각도 변화량
HeadservoDirection = 1 # 1: 증가, -1: 감소
# 서보 모터 움직임 함수
def Servomovement():
if smoothrun:
smoothmove()
else:
servos['Leg1F'].duty_u16(angle_to_duty(TOLeg1F))
servos['Leg1B'].duty_u16(angle_to_duty(TOLeg1B))
servos['Leg2F'].duty_u16(angle_to_duty(TOLeg2F))
servos['Leg2B'].duty_u16(angle_to_duty(TOLeg2B))
servos['Leg3F'].duty_u16(angle_to_duty(TOLeg3F))
servos['Leg3B'].duty_u16(angle_to_duty(TOLeg3B))
servos['Leg4F'].duty_u16(angle_to_duty(TOLeg4F))
servos['Leg4B'].duty_u16(angle_to_duty(TOLeg4B))
servos['Headservo'].duty_u16(angle_to_duty(TOHeadservo))
# 부드러운 움직임 구현 함수
def smoothmove():
global LALeg1F, LALeg1B, LALeg2F, LALeg2B, LALeg3F, LALeg3B, LALeg4F, LALeg4B, LAHeadservo
maxstep = 0
diffs = [
abs(TOLeg1F - LALeg1F),
abs(TOLeg1B - LALeg1B),
abs(TOLeg2F - LALeg2F),
abs(TOLeg2B - LALeg2B),
abs(TOLeg3F - LALeg3F),
abs(TOLeg3B - LALeg3B),
abs(TOLeg4F - LALeg4F),
abs(TOLeg4B - LALeg4B),
abs(TOHeadservo - LAHeadservo)
]
maxstep = max(diffs)
if maxstep == 0:
return # 움직임이 필요 없음
steps = int(maxstep)
step_Leg1F = (TOLeg1F - LALeg1F) / steps
step_Leg1B = (TOLeg1B - LALeg1B) / steps
step_Leg2F = (TOLeg2F - LALeg2F) / steps
step_Leg2B = (TOLeg2B - LALeg2B) / steps
step_Leg3F = (TOLeg3F - LALeg3F) / steps
step_Leg3B = (TOLeg3B - LALeg3B) / steps
step_Leg4F = (TOLeg4F - LALeg4F) / steps
step_Leg4B = (TOLeg4B - LALeg4B) / steps
step_Headservo = (TOHeadservo - LAHeadservo) / steps
for _ in range(steps):
LALeg1F += step_Leg1F
LALeg1B += step_Leg1B
LALeg2F += step_Leg2F
LALeg2B += step_Leg2B
LALeg3F += step_Leg3F
LALeg3B += step_Leg3B
LALeg4F += step_Leg4F
LALeg4B += step_Leg4B
LAHeadservo += step_Headservo
servos['Leg1F'].duty_u16(angle_to_duty(LALeg1F))
servos['Leg1B'].duty_u16(angle_to_duty(LALeg1B))
servos['Leg2F'].duty_u16(angle_to_duty(LALeg2F))
servos['Leg2B'].duty_u16(angle_to_duty(LALeg2B))
servos['Leg3F'].duty_u16(angle_to_duty(LALeg3F))
servos['Leg3B'].duty_u16(angle_to_duty(LALeg3B))
servos['Leg4F'].duty_u16(angle_to_duty(LALeg4F))
servos['Leg4B'].duty_u16(angle_to_duty(LALeg4B))
servos['Headservo'].duty_u16(angle_to_duty(LAHeadservo))
sleep(smoothdelay)
# 최종 위치로 설정
LALeg1F = TOLeg1F
LALeg1B = TOLeg1B
LALeg2F = TOLeg2F
LALeg2B = TOLeg2B
LALeg3F = TOLeg3F
LALeg3B = TOLeg3B
LALeg4F = TOLeg4F
LALeg4B = TOLeg4B
LAHeadservo = TOHeadservo
# 움직임 데이터 배열
walkF = [
[124, 146, 177, 150, 132, 115, 115],
[94, 132, 178, 139, 112, 84, 84],
[37, 112, 179, 139, 95, 42, 42],
[22, 95, 150, 115, 78, 30, 30],
[11, 78, 124, 92, 59, 13, 13],
[13, 59, 92, 58, 36, 2, 2]
]
walkB = [
[3, 34, 56, 65, 48, 30, 30],
[2, 48, 86, 96, 68, 41, 41],
[1, 68, 143, 138, 85, 41, 41],
[30, 85, 158, 150, 102, 65, 65],
[56, 102, 169, 167, 121, 88, 88],
[88, 121, 167, 178, 144, 122, 122]
]
Fheight = 5
Bheight = 5
walkstep = 1
# 블루투스 초기화
ble = bluetooth.BLE()
sp = BLESimplePeripheral(ble)
# 데이터 수신 시 호출되는 함수
def on_rx(data):
global motor_running, Fheight, Bheight, walkstep
command = data.decode().strip()
print("데이터 수신: ", command)
if command == 'w':
motor_running = True
print("전진 시작")
elif command == 's':
motor_running = False
print("정지")
elif command == 'a':
motor_running = True
Fheight = 2 # 좌회전을 위한 움직임 데이터 인덱스 조정
Bheight = 5
print("좌회전 시작")
elif command == 'd':
motor_running = True
Fheight = 5
Bheight = 2 # 우회전을 위한 움직임 데이터 인덱스 조정
print("우회전 시작")
else:
print("유효하지 않은 명령입니다.")
# 블루투스 연결 상태 확인 및 데이터 수신 설정
sp.on_write(on_rx)
# 메인 루프
while True:
if motor_running:
# walkstep 감소
walkstep -= 1
if walkstep < 1:
walkstep = 7
walkstep2 = walkstep - 4
if walkstep2 < 1:
walkstep2 += 7
# 첫 번째 다리 각도 설정
rotate1 = walkF[Fheight][walkstep - 1]
rotate2 = walkB[Fheight][walkstep - 1]
rotate3 = walkF[Bheight][walkstep - 1]
rotate4 = walkB[Bheight][walkstep - 1]
TOLeg1F = rotate1
TOLeg1B = rotate2
TOLeg4F = 180 - rotate3
TOLeg4B = 180 - rotate4
# 두 번째 다리 각도 설정
rotate1_2 = walkF[Fheight][walkstep2 - 1]
rotate2_2 = walkB[Fheight][walkstep2 - 1]
rotate3_2 = walkF[Bheight][walkstep2 - 1]
rotate4_2 = walkB[Bheight][walkstep2 - 1]
TOLeg2F = 180 - rotate1_2
TOLeg2B = 180 - rotate2_2
TOLeg3F = rotate3_2
TOLeg3B = rotate4_2
# Headservo 각도 업데이트
HeadservoAngle += HeadservoStep * HeadservoDirection
if HeadservoAngle >= HeadservoMax or HeadservoAngle <= HeadservoMin:
HeadservoDirection *= -1 # 방향 반전
HeadservoAngle += HeadservoStep * HeadservoDirection # 각도 조정
TOHeadservo = HeadservoAngle # 목표 각도로 설정
Servomovement()
sleep(0.01) # 필요에 따라 딜레이 조정
else:
# 정지 상태에서는 현재 위치 유지
sleep(0.1)
# 블루투스 데이터 수신 처리
if sp.is_connected():
sp.on_write(on_rx)
utime.sleep(0.01)
HTML
복사
출처
