

Hello! Tello!
파이썬을 이용해서 드론을 조종해보자.
시작은 import로 시작해준다.
import djitellopy as dt

아마 없다고 뜰텐데 역시나 pip install을 통해서 djitellopy를 설치해야 한다.
추가로 import time as t를 입력해서 딜레이를 사용할 수 있게 해준다.
그리고 텔로 드론을 ted라는 이름으로 정해준다.
ted.connect()로 드론과 연결해준다.

print(ted.get_battery())로 드론의 현재 배터리를 체크해주고
ted.takeoff()로 작동 시켜서 이륙 시켜주고
t.sleep(5)으로 그 상태를 5초간 유지 시켜준다.
그리고 5초가 지나면 ted.land()로 착륙을 시켜준다.
이제 한번 실행시켜 보자.
영상은 위의 작성한 코드를 사용해 드론을 조종하는 영상이다.
이착륙 코드
사각비행
이번엔 이륙 후에 사각비행을 해보자.
이번엔 send_rc_control이라는 코드를 사용해볼꺼다.
이 코드는 (0, 0, 0, 0)으로 설정이 가능한데
여기서 첫번째는 좌우, 두번째는 전진/후진, 세번째는 상승/하강, 네번째는 시계/반시계 회전이다.
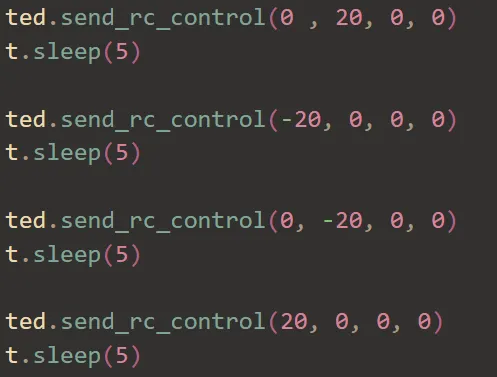
이 코드는 사각비행을 하는 코드다.
앞으로 20만큼 이동하고
좌측으로 20이동, 뒤로 20이동
마지막으로 우측으로 20이동 후에
착륙하게 된다.
각 이동마다 5초의 딜레이를 주어 비행이 잘 되도록 했다.
이 코드를 이제 실행해보자.
사각비행이 잘 되는 모습이다.
이런식으로 이 코드를 사용해 장애물을 피하는 것도 가능하다.